
To help you get up and running quicker, we have provided a virtual machine (VM) for VMWare Fusion that has:
- Ubuntu 18.04 LTS
- ROS Melodic
- Basic catkin workspace
-
Crosbot -
COMP3431 starter software
The VM is can be downloaded from:
OneDrive here
Note: you might need to be on a CSE network or CSE VPN to download this file because the server is behind a firewall.
The VM uses VMWare Fusion for the Mac and VMWare Workstation for Windows and Linux. CSE provides free licenses to students. To get the software go to: http://taggi.cse.unsw.edu.au/FAQ/VMware_Academic_Program/
Login credentials
The VM has an administrator account setup already.
- Username: rsa
-
Password:
rsarsa2020
You should change the password immediately after setting up your VM
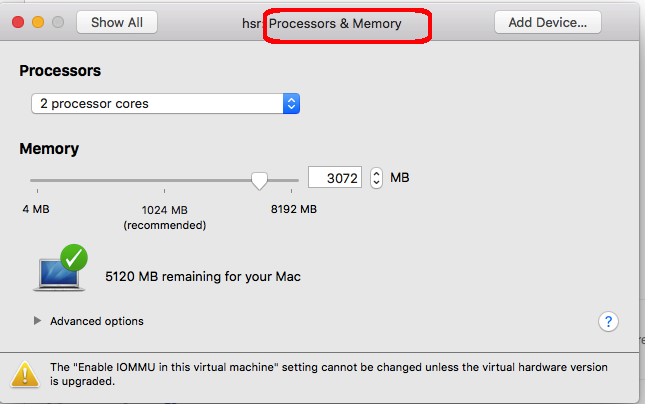
Adjusting VM Performance
The VM is quite conservative with its use of your computer hardware. Depending on how you use the VM, you may want to allocate more resources to it. Notably, the memory (RAM) and processors will make the most difference.
In virtual box, go to settings and select system .

In VMWare, go to settings and select Processors and Memory
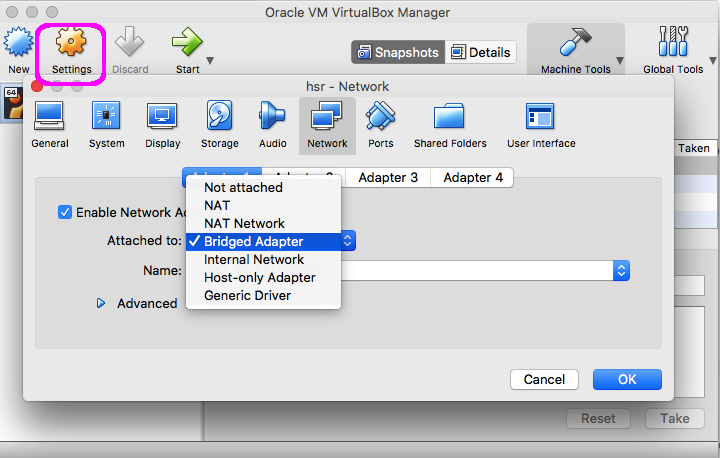
Bridging Network
A bridged network is required for the virtual machine to communicate with the robots over the network. If you are only using the virtual machine for simulations, you can leave the network setting as "NAT".
VirtualBox
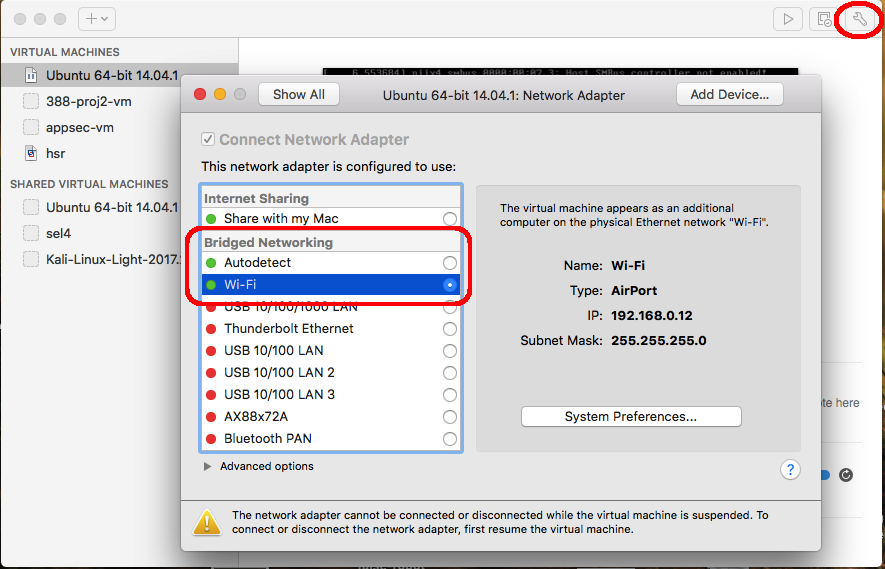
VMware
unsw_robotics issues
To enable your VM to connect to the
unsw_robotics
network you need to configure the network options of the VM.
- Open VM setting
- Select "Network Adaptor" options
- Select "Bridged Network" with "Wi-Fi" option
- Open "Advanced Options
- Change the "MAC Address" to be the same MAC as your wireless card
Then in your VM
- Enable the DCHP wired network connection
These configuration settings will only work on the
unsw_robotics
network. If you leave your VM open on any other network, you will no longer be able to get an internet connection.
Own PC setup
We recommend using ubuntu 18.04 LTS if you wish to run the software on your own partition or VM. This is the version supported and recommended by ROS Melodic.
Installation of ROS can be found here:
ROS Melodic install
You will then need to setup a catkin workspace containing the turtlebot3 packages. This is described in the turtlebot3 manual . Note that the instructions in the manual are for ROS Kinetic not ROS Melodic, so you will need to substitute the word melodic for kinetic in some commands.
If you prefer, you can run this script to install ROS Melodic and setup your environment.
Make sure to update the ROS_HOSTNAME and ROS_MASTER_URI with your correct local IP address. This is described in the manual here .
Warning: Please avoid updating ROS or ubuntu to a new major release on your VM or on your installation. Unfortunately things change (break), so there is no guarantee of support on later versions including compatibility with turtlebot3.
Resource created Sunday 06 September 2020, 05:54:56 PM, last modified Sunday 18 September 2022, 09:27:44 PM.